塔防游戲自誕生以來,憑借其獨特的策略性和趣味性,一直深受玩家喜愛。而在眾多塔防作品中,《王國保衛戰》系列無疑是屹立于塔防界的一顆璀璨明珠。它以精致的畫面、豐富的關卡設計和深度的策略玩法,贏得了全球玩家的贊譽。如今,這一經典之作的續作《王國保衛戰4》將于11月4日正式回歸,再次點燃玩家們的激情。
回顧《王國保衛戰》系列,從初代到如今的第四部,它始終保持著高水準的游戲品質。每一部作品都在原有基礎上進行創新,引入了新的英雄、塔樓和敵人,讓玩家在熟悉的框架下體驗新鮮感。游戲不僅考驗玩家的即時策略能力,還融入了角色養成和資源管理元素,使得每一場戰斗都充滿變數和挑戰。在塔防游戲市場日益飽和的今天,《王國保衛戰》憑借其獨特的魅力和持久的可玩性,成為了無數玩家心中不可替代的經典。
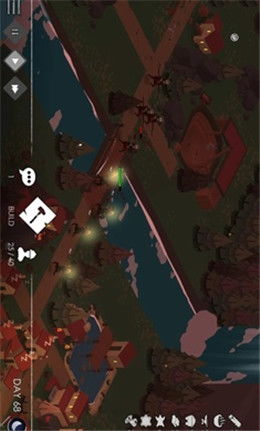
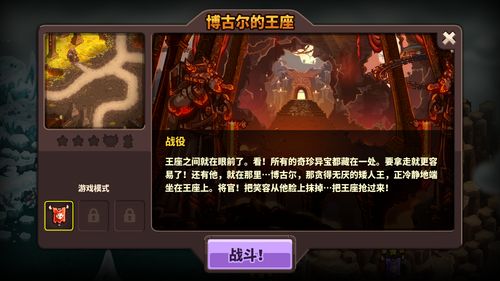
《王國保衛戰4》的榮耀回歸,是開發團隊對玩家期待的回應,也是對塔防游戲精髓的致敬。據悉,新作將延續系列的經典玩法,同時加入更多創新內容。例如,新增的防御塔類型、更復雜的敵人AI以及更宏大的世界觀設定,都將為玩家帶來前所未有的游戲體驗。游戲還優化了畫面表現和操作界面,確保在移動設備和PC平臺上都能流暢運行。對于那些懷念經典塔防的老玩家,或是初次接觸該系列的新玩家,《王國保衛戰4》無疑是一次不容錯過的盛宴。
11月4日,這個日期不僅僅是一個發布日,更是塔防愛好者們的節日。《王國保衛戰4》的回歸,不僅是對經典的延續,更是對游戲行業的一種啟示:在快節奏的游戲市場中,深度和品質依然能贏得玩家的心。讓我們共同期待,這款塔防明珠如何再次閃耀光芒,為玩家們帶來更多值得回味的時刻。準備好你的策略,迎接這場榮耀之戰吧!